基于NI myRIO的移动机器人灭火系统设计及其在移动多媒体系统中的应用开发
随着智能机器人技术的快速发展,其在安防、救援、巡检等领域的应用日益广泛。本文聚焦于一个综合性实践项目:设计一款基于NI myRIO嵌入式平台的移动机器人灭火系统,并探讨其与移动多媒体系统进行技术集成与开发的路径。该系统不仅体现了硬件集成与实时控制能力,也展示了数据可视化与远程交互的现代技术趋势。
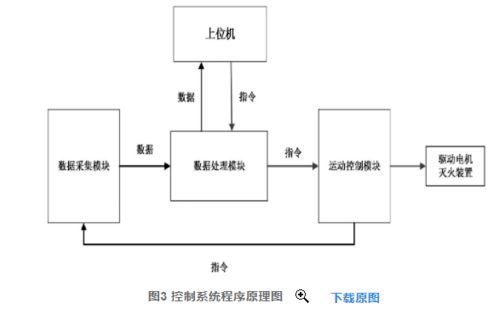
一、 系统总体架构设计
整个系统以NI myRIO为核心控制器。myRIO集成了FPGA与实时处理器,兼具高性能计算与灵活可编程I/O的优势,非常适合作为移动机器人的“大脑”。系统架构主要分为三层:
- 感知层:由火焰传感器(通常采用红外紫外复合传感器)、烟雾传感器、红外避障传感器、摄像头(用于视觉导航与火源识别)以及编码器(用于里程计计算)构成,负责采集环境信息。
- 控制决策层:即myRIO控制器。其实时处理器运行LabVIEW或C语言编写的核心程序,处理传感器数据,执行灭火决策(如基于传感器融合的火源定位),并生成电机控制指令。FPGA则可用于处理高速、并行的任务,如电机PWM信号的精确生成或部分图像预处理。
- 执行与交互层:包括直流电机驱动的移动底盘、水泵或小型灭火装置(如CO2喷射器)、以及一个用于远程监控的移动多媒体终端(如平板电脑或手机)。
二、 移动机器人灭火功能实现
- 自主导航与避障:机器人采用差分驱动方式。myRIO读取编码器数据,通过航位推算法估算自身位置。结合红外或超声波避障传感器,实现基本的随机搜索或沿墙走等导航策略,确保在模拟房间内安全移动。
- 火源探测与定位:火焰传感器提供非视觉的初步报警。摄像头捕捉的图像流通过myRIO的处理器进行处理。利用LabVIEW的视觉开发模块或OpenCV库,进行颜色空间转换(如寻找红色/黄色高亮区域)和形状分析,从而在图像中识别并定位火源。结合机器人自身位置,计算出火源的相对坐标。
- 逼近火源与灭火:控制程序驱动底盘向火源坐标移动。当火焰传感器达到阈值且视觉确认后,机器人调整姿态,对准火源,并启动执行机构(如开启水泵喷水或启动风扇吹灭蜡烛)。灭火后,传感器数据恢复正常,机器人可继续执行搜索任务。
三、 移动多媒体系统的技术开发与集成
此部分是系统的“智能”与“交互”延伸,旨在提升系统的监控能力和用户体验。
- 通信链路建立:myRIO具备Wi-Fi功能。通过在myRIO上搭建一个轻量级Web服务器或使用TCP/UDP通信协议,与移动终端(如iOS或Android设备)建立无线数据连接。
- 多媒体数据传输与显示:
- 视频流传输:将myRIO摄像头采集到的实时图像进行压缩(如MJPEG),通过网络流传输至移动终端。终端App开发(可使用LabVIEW Mobile Module、MIT App Inventor或原生开发)实现视频流的接收与显示,提供第一人称视角监控。
- 数据可视化:将机器人的状态数据(如传感器读数、电池电量、当前位置、系统状态)打包成JSON等格式,实时发送至移动端。在App界面中以仪表、图表、地图等形式进行动态可视化展示。
- 远程交互与控制:移动App不仅是一个监视器,还可作为远程控制终端。用户可以通过触摸屏界面发送控制指令(如手动前进、后退、启动灭火等),这些指令通过网络发送给myRIO,由控制器解析并执行,实现人机交互闭环。
- 警报与日志记录:当探测到火情时,系统可通过移动App推送警报通知。关键的运行事件和灭火过程数据可以记录在移动端或服务器端,供事后分析与评估。
四、 系统特点与创新点
- 软硬件协同:充分发挥NI myRIO软硬件一体化的优势,LabVIEW图形化编程加速了原型开发,FPGA确保了实时性要求高的控制任务。
- 功能集成度高:将传统的移动机器人控制与现代移动多媒体应用开发相结合,实现了从物理灭火到远程智能监控的完整链路。
- 教学与科研价值:本项目涉及嵌入式系统、机器人学、传感器技术、计算机视觉、无线通信和移动应用开发等多个技术领域,是一个极佳的跨学科综合实践案例。
五、
基于NI myRIO的移动机器人灭火系统设计,结合移动多媒体技术开发,构建了一个从感知、决策、执行到远程交互的完整智能系统原型。它展示了如何将先进的嵌入式平台与流行的移动互联网技术相融合,为解决实际安全问题提供了一种可扩展、可交互的智能化方案。可在算法上引入更先进的SLAM(同步定位与建图)技术以实现精准导航,并利用机器学习优化火源识别模型,进一步提升系统的自主性与可靠性。
最新产品

苹果、三星手机专配 太空步F6250移动电源的多媒体系统技术开发解析

移动多媒体系统技术开发的前沿探索 以杭州校众信息技术的实践为例
移动多媒体系统技术开发 引领数字告示系统的未来创新
基于OMAP1510双核架构的移动多媒体通信终端的设计与实现

广州工厂直销智能多媒体电脑一体机 引领移动多媒体系统技术开发新潮流
格式工厂中文版4.9.5 移动多媒体系统技术开发的得力助手

汽车电子产品用辐射抗扰测试系统与移动多媒体系统的技术开发

智能档案存储与教学革新 优质钢制移动密集架与多媒体讲台的技术融合

探索PG-9025多媒体蓝牙手柄 移动多媒体系统技术开发的革新力量

数码新宠 城市骆驼M7多媒体移动硬盘——解析移动多媒体系统的技术演进